
1月15日,在邵阳学院魏源国际学院的办公室里,在手机App的指挥下,一台机器臂灵敏地抓取面前缠着紫红色丝带的物体,自如地转动到指定位置放下,整个过程流畅。
望着这个臂长两米的的机器臂灵活运转,来自邵阳学院四个院系的17名团队成员眼神里满是成就感。“八个月的日夜奋斗没有白费。”项目带头人Pedro Chou说出了大家的心声。
招兵买马

在最近一次演示时,此前全身漆成银色的机器臂装上了黑色的外壳,换上了更大的抓手,抓重达到了3公斤。“它可以自动识别、自动定位、自动捕捉。”负责演示的邹家帅介绍,“比如现阶段测试的是抓取红色物体,它可以认出这个红色瓶子,并抓取移动到指定地点。”他示意穿着大红羽绒服的彭雄躲一躲。另一端,“通过手机App可以同步观看机器臂摄像头,监看机器臂的动作,实现监控。”拿着手机演示的Pedro介绍,机器臂配有GPRS加密模块,可以根据密钥识别,如果密码输入错误,它是不会工作的。他说,“我们还添加了写字功能,未来它可以抓起毛笔写简单的中国字。
Pedro Chou是哥斯达黎加人,有四分之一华人血统,能说简单的中文。他身材魁梧,整齐的西装和细框眼镜又显得非常斯文,爱笑的他眼睛常眯成一条上翘的细缝。在2015年年初起担任邵阳学院魏源国际学院教师时,Pedro就萌生了一个念头:开发一个多功能、可升级的机器人模型,为日后学校研究类似项目奠定基石,更重要的是,以机器人研发为平台,能带领学生进行实践操作和创造设计。2015年5月28日下午,机器人研发座谈会召开后,Peter 启动了机械臂研发项目。
Pedro是个想做就做的老师,他首先从同事、学生中寻觅人才,先是偶然认识了电气系教师陈伟,陈伟老师又将电气系的优秀学生介绍过来。最初。Peter组建了一个四人小团队。不过在前两个月,当Peter分配任务时,就有同学难以兼顾课业与项目而退出了项目。
“Pedro老师十分和气,而且非常认真,他教什么课都希望每个同学都学懂,课后还会给我们补课。”魏源国际学院的欧阳倩回忆,“5月份还不是很忙时,他常常给我们出谜题,开发我们的思维。”更妙的是,一开始进组后交流都还磕磕巴巴,“现在大家能get到Pedro的英文笑点了。”Pedro也就成了成员口中更亲切的“Peter”。剩下的成员被Peter的热情与坚定所感染,又通过自己的人脉找外援,城建系、机械系、信息系的同学陆续加入进来,第五个月时,项目组发展为17名成员,大多为大三、大四学生。
跑遍全城


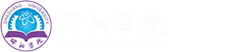
Peter与组员们讨论认为,从大家的现有技术水平来看,设计一个关节绕轴运动式的机器臂较为可行。从结构上来看,机器臂分为抓手、上摇臂、下摇臂、底座四个部分,由内置的控制芯片接受指令,蜗轮蜗杆通过舵机的旋转来为机器臂提供动力和控制方向。
根据不同的功能实现,小组分为电子组、机械组和后勤组。电子组负责机器臂的控制系统,包括电路、控制程序及功能设定;机械组负责设计和制作机械臂各零部件以及安装;后勤组负责项目财务管理、器件采购、人员安排、项目进程监督与管理。团队稳定后,在没有任何经验以及设备情况下,Peter和学生凭着满腔热血在简陋的办公室里忙活起来。
首先,由机械组进行模型设计和制作。由于邵阳市的资源和设备相对匮乏,很多需要精密加工的材料和仪器难以找到。还有个困难就是经费问题,机械组的彭雄说,无奈之下,他们只好采用最俭省的方法来设计制造,有金属光泽的外壳其实是一层上漆的塑料硬壳,预期中的铝板也被五金钢和塑料板取代,不过也便于塑形。不仅如此,在项目经费批下来前,组员还挤出生活费先垫着,几乎每一个零件都经过了砍价的拉锯战,最终成本约为1万4千元,而一般采取一体化成型设计的机器臂至少需要6万元。
机械组提出需求,后勤组负责购买。为了买到制作材料,后勤组同学跑遍全城,寻找卖家。“想找到心仪的材料很难,有时还得凭着运气去瞎撞。”彭雄回忆,“邵阳的工厂太少,我们四处打听,甚至到了在街上遇到人就问的程度”,最后终于在资江一桥附近找到两家工厂,进行摇臂与底座的制作打孔。
机器臂抓手的线切割则更加难找,一开始网上买到的偏小,这回是机械组的彭雄和陈子林到市区各处寻找,“线切割工厂比较冷清,整个工厂都只有一个人,在邵水桥东一个非常偏僻的地方。”陈子林说。“要不是通过这两家工厂人员的介绍,他们是决计找不着线切割工厂的。
大的框架搭建后,小的零件和工具就从五金店买或者从网上淘。麻烦的是,“由于语言文化的差异,Peter说的零件我们翻译得不太对,常常买错,后来直接让Peter发照片过来。”后勤组欧阳倩回忆起当时的种种困难。有时借工具,为了信誉还要押上自己的身份证。
终于,2015年10月,一个高大挺拔的机器臂外形出现在了魏源国际学院外教办公室里。
灌注“灵魂”

接下来是电子设计部分,通过软件与硬件对接,实现对机器臂运动的闭环控制,灌入了电路程序这一灵魂,机器臂便可工作。
“通过安装在上面的摄像头装置获取目标物体的图像,并通过图像处理得到目标物体的三维坐标,从而运用逆运动学求解得到机械手关节旋转变量。”电子组的邹家帅介绍。“计算机发送程序命令到PIC控制电路板,控制板再发送运动指令给伺服电机,伺服电机驱动机器臂各关节进行关节旋转运动,终端执行器,即机械手的夹手所到的位置由摄像头进行位置检测,摄像头将得到的终端夹手位置的三维坐标再反馈给计算机进行检测,通过比较期望坐标与机械手的夹手实际坐标的差值,不断调节机械手末端夹手的位置从而完成实验任务。”
听上去“不明觉厉”的术语,在电子组成员的脑海中已经自动翻译成程序语言,他们时常通宵达旦写程序,与硬件对接时需要反复测试调试。在现场演示前一天,邹家帅、黄伟、罗炜、李柏林四人写到早上7点才离开,回寝室休息1小时后又赶回演示现场,毕竟,这间辟作开发实验室的外教办公室实在挤不下18名“随便找个地儿躺一下”的项目组成员和1台尺寸不小的机器。
电子组的黄伟最为辛苦,每次出现故障,都要不停地测试线路,挨个排除故障因素,“这种摸着石头过河的感觉特别难受,稍微脆弱点的就很容易放弃”。不同组甚至会因意见不一致而激烈争吵,不过限于“科学讨论”,熬夜时仍继续同吃同住,在Peter的带领和鼓舞下,全体成员们坚持到了最后。2015年的平安夜,软硬件对接成功,一个“瘦瘦高高的大家伙”灵巧地抓起一只瓶子,小心翼翼地放在指定地点,机器臂“活”过来了。那一刻,项目组成员觉得那些汗水与付出都是值得的。
技能提升

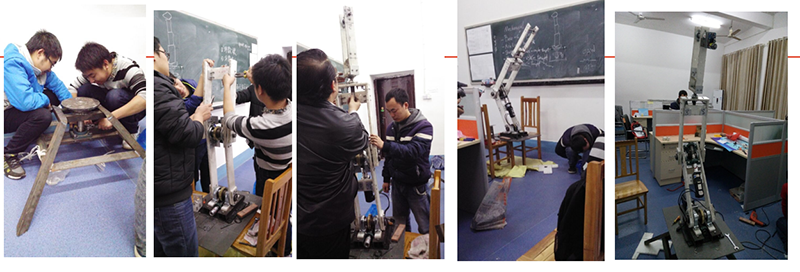
2016年1月,一个完整的机器臂呈现在大家面前,如果不是因为底座摆置较高,它可以从地上认出一根树枝并捡起来。从无到有,历时8个月,漫长而曲折。
“每个成员在这段艰辛的项目旅程中都得到了技能的提升,但他们获得更多的是做事的态度,坚持不懈、相信自己的态度。”Peter总结时表示,他评价邵阳学院的学生都很聪明勤奋,制作机器臂的知识大多是他们从未接触过的,他们通过查文献、搜集产品说明书、学习网络课程,逐步建立起知识储备。彭雄感慨:“这其中经历了两次大的改变,一次是外形,一次是力传动方式,一个改变带来很多变数,现在包括我们自己都不敢相信,我们能在没有任何仪器、设备的支持下完成项目。”后勤组的唐耿飙笑着说:“我觉得做篇硕士毕业论文都够了。”
项目组完成的是一台小型工业机器人的雏形,从汽车业到机床的自动化装卸,再到塑料业的自动化解决方案,甚至到未来家用电器领域,机器人可以胜任大多数任务,并保证精确严谨的品质。或许有不明者会认为这台“低配版”机器臂不值一提,但这无疑是一群敢作敢为的大学生的才智心血结晶,只要奠下一个起点,就有远征的无限可能,就如《星球大战》中的著名机器人C3PO,也是从铜线裸露的元器件拼凑、再一步步完善从而成为一个时代符号的。电子组的成员表示,只要条件允许,进一步升级机器臂也是有可行性的。
项目组的成员有些是大四学生,面临毕业就业。Peter很关心学生的就业问题,他悄悄告诉来访的记者,如果报纸上有招聘启事,可否留意下是否有适合他的学生的岗位。来自河北的王磊却自信地说,他们一点都不担心自己的前程,因为在Peter身上学到了自信。在此期间,项目组成员杨健就得到了一家兵工厂伸出的橄榄枝,但是他因为忙项目而拒绝了。“这么好的机会放弃了,说不后悔也是假的,但是我觉得做一件事就要做好。”杨健说。
至于Peter的下一站,他将赶赴湖北某高校任教,并带领学生试着开发无污染的汽车电池,他将继续邀请邵阳学院的这些学生参加,他说,他们永远是一个团队。
(周芝 余晓冬)